
Nです.
Robotics Toolboxを使う機会があったので今後のために簡単に使い方をまとめていきたいと思います.
今回はRobotics Toolboxをダウンロードしてデモを動かすところまで行きたいと思います.
Robotics Toolboxのインストール
Robotics Toolboxは2022年現在オーストラリアのQueensland Universityで研究されているPeter Corke先生が作成されたツールボックスです.このToolboxは簡単に多リンクモデルの順ダイナミクスや逆ダイナミクスが簡単に解析できるみたいです(書いてる時点でまだ使ったことない).
Robotics Toolboxのインストールには以下の3つの方法があるようです.
- MATLAB Driveからインストール
- .mltbxファイルを使用してインストール
- GitHubからクローン(インストールする)
今回は.mltbxファイルを使用しました.
まずPeter Corke先生のwebページからRTB**.*.mltbxファイルをダウンロードしました.
その後,ダウンロードしたmltbxファイルをMATLABを立ち上げた時のウィンドウからこのファイルをダブルクリックしてインストール完了です.

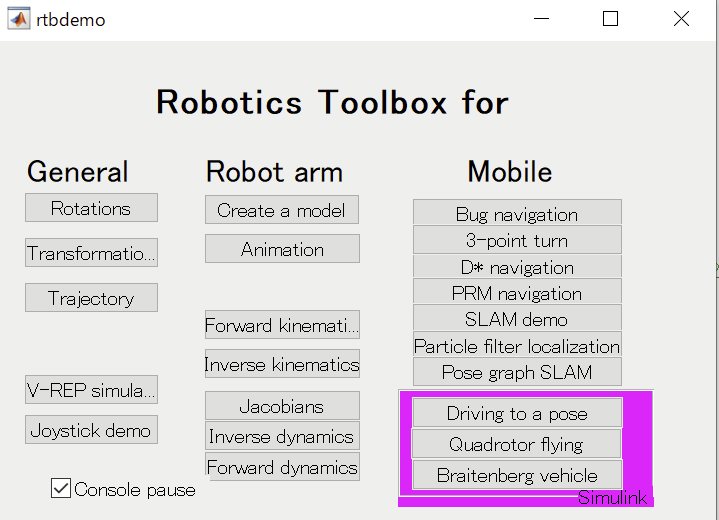
これでrtbdemoというコマンドを打つとしたの図のような画面が出てきていろんなデモが試せます.
これらのデモがエラーなしに動けばインストール完了です.
例えばForward dynamicsとかを試してみると結構面白いと思います.

コメント